
06-0043 |
|
06-0043 |
Characteristics of Our Lunar Rover
For our rover to last on the moon, it will have to contain important pieces
that will help us succeed in finding water on the moon. The largest
part of our rover is the body. It will contain the vital organs.
Two heaters will be placed in the body to keep it warm because of the extreme
cold. It also will have 4 rechargeable batteries. To keep our
batteries running in space, our rover will have a retractable solar panel
that can extend to a very high level above the darkness of the small craters
in the Aiken Basin where it will be searching for water. This will
ensure that it can receive the sunlight that hits the other 64% of the
Aiken Basin that is not permanently shadowed, without having to move out
of the small craters. The body will also house a spectrograph analysis
machine and a computer.
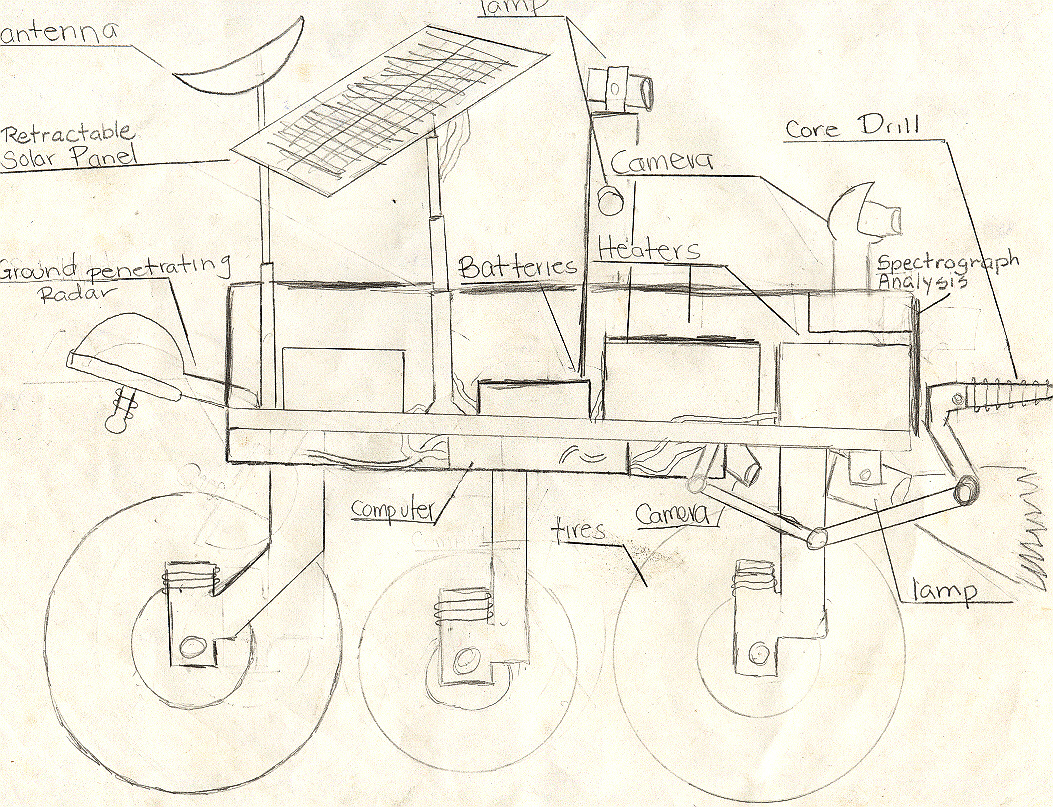 The lunar rover will search for water by using a ground penetrating radar.
This radar will send radio signals into the regolith and then pick up any
alterations in the signal.[6] Once
an alteration is detected, the lunar rover will have a drill which can
take core samples that can be tested for the presence of water and ice.
Then a spectrograph analysis machine will run a water analysis on the core
sample to test for the presence of water.[6]
The lunar rover will search for water by using a ground penetrating radar.
This radar will send radio signals into the regolith and then pick up any
alterations in the signal.[6] Once
an alteration is detected, the lunar rover will have a drill which can
take core samples that can be tested for the presence of water and ice.
Then a spectrograph analysis machine will run a water analysis on the core
sample to test for the presence of water.[6]
The rover will need a light source because of the darkness, so it will
have three lamps. One lamp will be located at the front of the rover
to guide the way, and the other two will be located to the left and right
of the rover so that it can see on the sides. It also will have 2
cameras; one of them will be located on the top of the rover. It
will have the ability to rotate and see all visual angles. The second
camera will be on the bottom and be able to take pictures of the ground
directly in front of the rover.
Our lunar rover will have six wheels. There will be three on each
side. Each wheel will have its own motor and suspension system so
that each wheel can swivel on its own. Each wheel will have a differential
or rocker so that when one side of the rover goes up, the other side will
automatically go down. This will enable it to travel over rocky terrain
without tipping over.[4]
Our lunar rover will be navigated by a computer that can send signals thru
an antenna to Earth satellites which can then send the signals down to
N.A.S.A.[5] Any information inputted
to the computer by the touch sensors, cameras, spectrograph analysis machine,
& ground penetrating radar can be sent back to scientists on Earth
who can then direct the rover.